

Parallel robots offer impactful automation solutions for manufacturers and end-users in traditional and non-traditional robotic automation industries. Their unique construction provides benefits for special applications with high demands for speed and precision. This article will cover the basics of parallel robots, their applications, and selecting one for your application.
What are Parallel Robots?
Parallel robots are a class of robots defined by their mechanical construction. Anywhere between 3-6 identical mechanical linkages connect the base to the manipulating platform. This construction is where the “parallel” name is derived. Curiously enough, geometric parallelism isn’t a feature of parallel robots!
Parallel robots are also unique in how they are driven. Most industrial robots, including parallel models, are driven by electric servo motors. Servo motors provide high torque and incredible precision. However, parallel robots can be configured as pneumatic or hydraulic powered models. The ability to drive robot actuators by methods other than electric motors is unique in industrial robotics. Application requirements determine the type of parallel robot that should be deployed. The various configurations help cover a broader range of application types than what would normally be available.
Industries for Parallel Robots
Many industries have needs for high-speed and high-precision applications. Parallel robots are well-positioned to support manufacturers in the following industries:
- Aerospace
- Automotive
- Precision Manufacturing
- Additive Manufacturing
- Medical
- Food and Beverage
- Electronics
- Plastics
Common Types of Parallel Robots
Various parallel robot types exist in today’s market. This provides manufacturers with the flexibility to choose the best solution for their applications. The two most common parallel robot types are standard parallel robots and delta robots. Standard parallel robots are more often referred to as:
- Hexapod Robots
- Parallel Manipulators
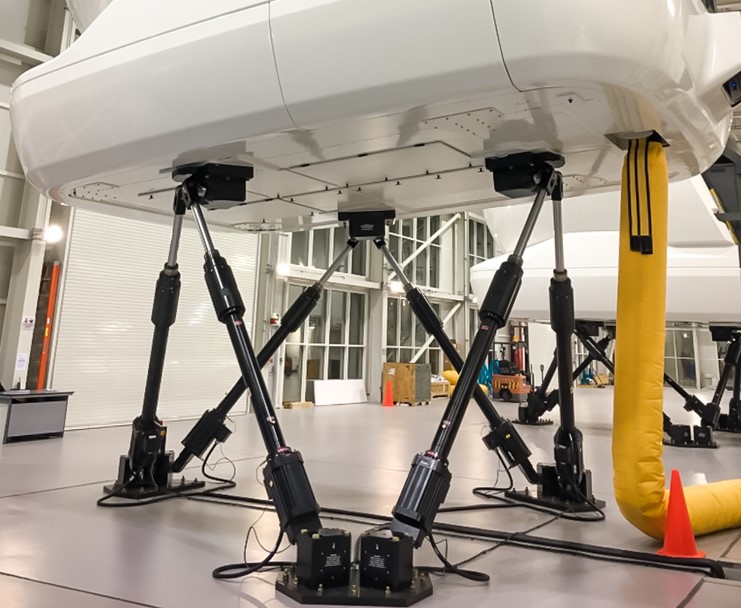
- Stewart Platforms
Generic parallel manipulators are typically mounted with their base on the ground. This is common for applications like flight simulators. These applications require a motion from underneath the cockpit. However, parallel manipulators can be mounted horizontally for some applications. For example, precision machining on a lathe commonly requires horizontal mounting. Depending on the application, these models can be configured with electric motors, pneumatics, or hydraulics. For example, high payload applications like flight simulators require immense power. Therefore, these robots are often driven by hydraulic actuators instead of electric motors.
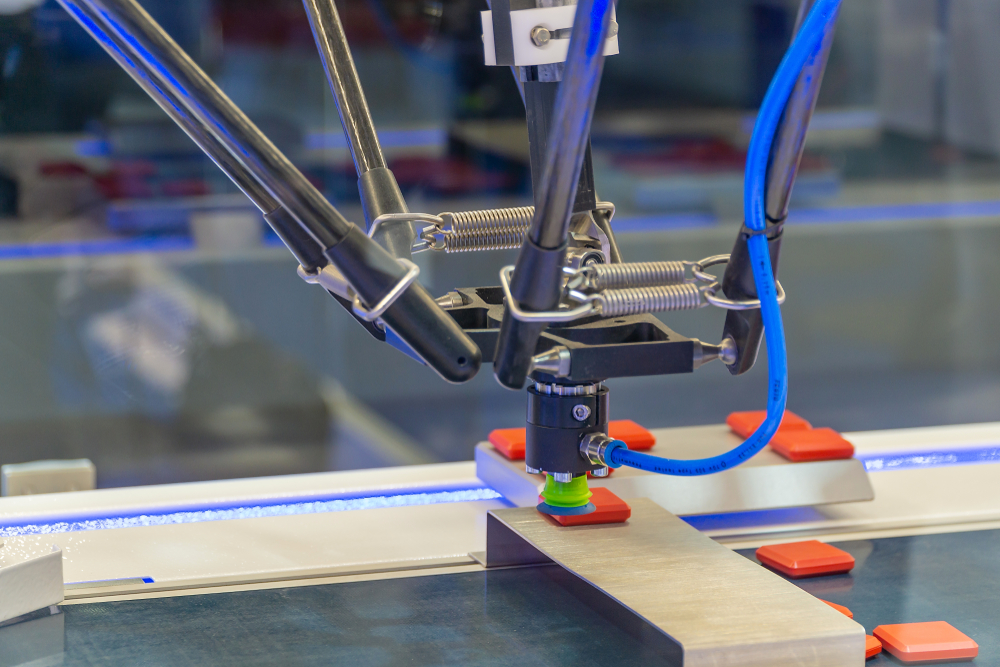
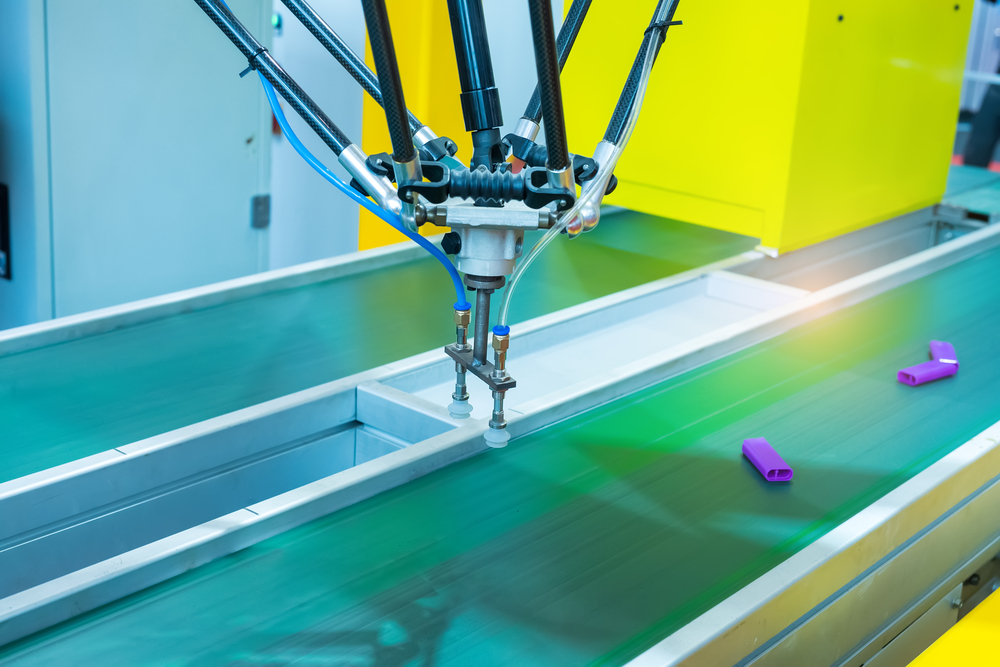
Delta robots are often mounted over the top of the product or workpiece. A typical setup involves a frame above a conveyor belt. The delta is mounted with its base on the bottom of the frame and its manipulator facing downwards such that it picks up parts from the top. Deltas tend to be restricted to electric motor power. What they lack in actuation options, they make up for in end-of-arm tooling options. Common examples of end-of-arm tooling options include:
- Suction Cups
- Electromagnets
- Tactile Manipulators
Applications for Parallel Robots
Parallel robot applications have demanding requirements. Alternative robot types are not always capable of meeting these demands. Thanks to their industry-leading speed, parallel robots are unmatched for high-speed applications. However, this speed comes at a cost. Understanding their strengths and limitations helps clarify which applications are appropriate.
Strengths of Parallel Robots
Parallel robots are valued for their speed and precision. In some configurations, their payload capacity may also be a strength. Their mechanics and light frame enable parallel robots to reach incredible rates of speed, with some delta models reaching up to 100g of acceleration in standard pick and place applications.
This acceleration is incredibly valuable in high-speed pick-and-place applications. Common examples include lightweight food packaging tasks. Delta robots can pick small food packages and pack them neatly in boxes for shipping at unrivaled speeds compared to other alternatives. These products do not require delicate handling and can withstand the high inertial load that results from quick speed changes.
Additionally, some versions of parallel robots can be fitted with hydraulic actuators. This allows for significant increases in payload capacity, orders of magnitude greater than standard delta robots. Hydraulic parallel robots are commonly deployed in flight and automotive simulators. These applications require both high speed and payload capacity. Parallel robots driven by hydraulic actuators can meet both of these requirements.
Limitations of Parallel Robots
As with any automation solution, parallel robots have limitations that mean they are not the best choice for every application. There are certain tasks that parallel robots simply won’t be a solution for. Your knowledge of these limits will better inform your purchase decision, ultimately leading to a more successful outcome for your automation project.
Reach limitations are the most glaring weakness of parallel robots. The same mechanical construction that enables high speed also reduces their overall reach. Standard models typically have a spherical work envelope. Their lack of reach limits them to applications that are characterized by short, quick movements. For example, pick and place and palletizing applications are fundamentally similar tasks. However, the scale of palletizing applications tends to be relatively large. As a result, parallel types like delta robots won’t be able to traverse the distance required to complete these tasks.
Their mechanical construction limits their flexibility of movement. Compared to six-axis robots, parallel robots are rigid. This is an important requirement for some applications such as welding, painting, and complex assemblies.
How to Choose a Parallel Robot
Parallel robots are a great choice for many types of applications. Determining application fit is only half the problem, however. There are additional important considerations to make before purchasing a parallel robot system.
Determine the Type of Parallel Robot You Need
We previously overviewed two main types of parallel robots. Determining the type of parallel robot you need should be your first consideration. Payload capacity and reach requirements can help you determine the optimal solution.
High payload and low-reach applications tend to favor standard parallel manipulators. These models tend to have a lower range of motion than delta robots. Additionally, they tend to be floor or horizontally mounted which is the main factor in them excelling in simulator and precision manufacturing tasks.
Delta robots excel in lightweight and high-speed applications like pick and place tasks. They have higher reach capabilities than other parallel robot types. This means they’ll excel in packaging and surgical applications, while other types can struggle. It’s important to remember that even delta robots are quite reach-limited. Moderate to large reach requirements should lead you to consider other robot types.
End of Arm Tooling
Choosing the right end of arm tooling for your application is critical. The end-of-arm tooling refers to the manipulator that grips, holds, or otherwise interacts with the product. The characteristics of your application define the proper end of arm tooling. For example, suction cups can be a cost-effective solution for lightweight and high-speed applications. As a counter-example, consider a mechanical gripper. This option might be a decent choice for packaging steel bolts from a conveyor belt. However, an electromagnetic gripper could be an even better choice here. An electromagnet would take advantage of the ferromagnetic properties of the product.
There are plenty of complexities and considerations around parallel robots and their applications. Adhering to simple guidelines and understanding the characteristics of parallel robots are critical. This strategy will guide you to the right solution for your automation projects. Parallel robots offer benefits that are unmatched by alternatives in the industrial robot market. Applying them to suitable tasks is key to using this potential effectively.
Do you need help finding potential providers for your automation project? HowToRobot’s online platform makes exploring your options and receiving multiple offers from potential suppliers easy. In addition, you can share your needs risk-free and anonymously, leading to streamlined interaction with suppliers ready to provide you with solutions to help your specific situation. Contact us today to get started.








